
Remotely Operated Vehicles ROVs have gained increased recognition for their accessibility and practicality in executing underwater tasks that would be challenging for human divers. Their compact design allows them to reach significant depths, proving valuable across various fields from scientific to industrial.
In the present era, ROVs find application in multiple domains, including exploring the depths the ocean and conducting scientific research. Fitted with various sonars and imaging sensors, they offer valuable data for research purposes and are capable of collecting samples and performing other tasks.
In oil and gas industry, they play a crucial role for inspecting, repairing, and maintaining the underwater infrastructure. With the capability to be outfitted with manipulators and robotic arms, they can execute tasks such as equipment installation, surveys etc. Likewise, ROVs are also extensively employed in routine inspections of structure of dams and river bridges.
The concept of ROVs emerged in military sector because of its decreased cost and increased functionality, dating back to 1950s. ROVs are employed in military and defence sector for carrying out search and rescue operations, inspection of submerged structures, and even mine countermeasures. They are also helpful in aquaculture and fishing industry.
Keeping in view its diverse application, the department of Naval Architecture at PNEC embarked upon the project of designing and fabrication of multi role ROV named as AQUABOT. The designed ROV, engineered for operations at a depth of 10 meters is poised to fulfill the designated applications and objectives. These include survey and inspection of underwater structures while hovering at a depth. The figure below shows the flow chart consisting of all the design phases of AQUABOT:
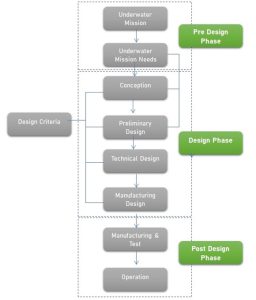
Under these phases, following activities and analyses were undertaken:
a. Determination of preliminary dimensions and specifications of the underwater vehicle to meet performance and mission requirements.
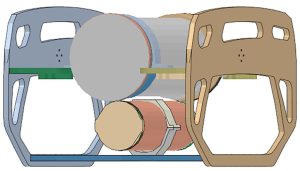
b. Development of detailed 3D model of the vehicle’s hull incorporating structural and hydrodynamic considerations.
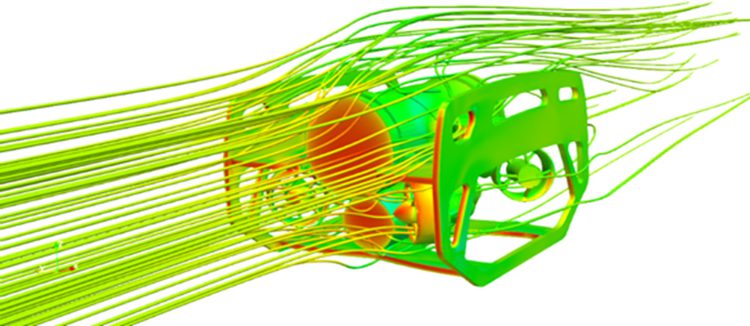
c. Estimation of resistance the vehicle will encounter in the water and analyze the power requirements for propulsion.
d. Evaluation of vehicle’s surfaced and submerged stability characteristics to ensure safe operation in various sea conditions.
e. Assessment of vehicle’s ability to handle waves and rough sea conditions, considering its design and stability.
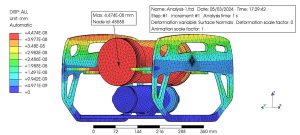
After the development of 3D model using initial sizing in Paramarine® software, tcomprehensive structure analysis was carried out using Ansys – FEM Module. The analyses assisted in selection of preferred materials (Nylon, PVC, and PLA) based on stress generation and deformation characteristics. This ensures that the ROV can withstand the underwater environment at a depth of 10 meters without compromising its structural integrity.
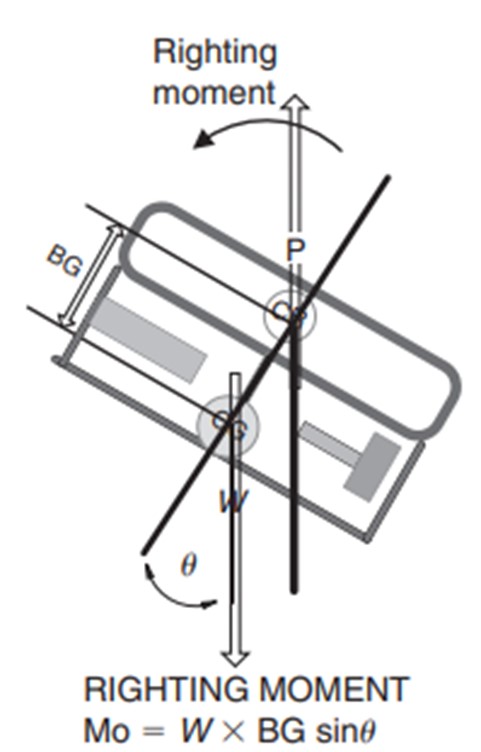
8. The stability analysis carried out using Paramarine® software confirmed the ROV’s stability both in surfaced and submerged conditions. The ROV maintains its equilibrium underwater, providing a reliable platform for various tasks without the risk of unwanted tilting or drifting.
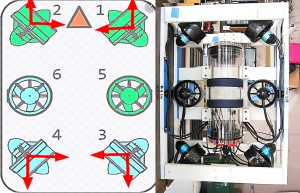
The investigation into the thruster configuration revealed that a six thrusters’ setup is optimal for AQUABOT. The thrusters’ strategic placement and alignment contribute significantly to the ROV’s overall performance, enabling it to execute complex maneuvers with ease.
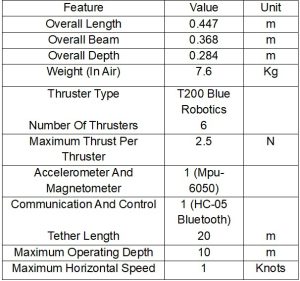
The finalized characteristics of designed AQUABOT are as under:
Water testing of ROV conducted at NUST-PNEC can be seen in the below given video:
The significance of this project extends beyond academic achievements. In Pakistan, where submersible technology is still in its infancy, the successful design and implementation of an ROV represent a considerable advancement. The introduction of this technology opens numerous opportunities for the country. It can play a crucial role in enhancing maritime research, facilitating underwater inspections and maintenance of infrastructure, and potentially aiding in disaster recovery and marine conservation efforts. As technology continues to evolve, ROVs will undoubtedly play an even more crucial role in ensuring the sustainable exploration, protection, and utilization of this vast and vital resource.
The author is Dean at Naval Architecture Department, Pakistan Navy Engineering College (PNEC), National University of Sciences and Technology (NUST), Pakistan. He can be reached at [email protected].
Research Profile: https://bit.ly/3LfJPvm

![]()