The rapid advancement of immersive virtual reality (VR) technologies has opened unprecedented possibilities for enhancing remote collaboration and teleoperation tasks, enabling users to experience realistic telepresence in distant or hazardous environments. However, achieving effective and intuitive control in VR-based telepresence systems remains challenging, often hindered by factors such as latency, limited situational awareness, and inadequate interaction paradigms. To address these limitations, we propose a hybrid control paradigm designed to seamlessly integrate immersive VR interfaces with advanced teleoperation techniques, leveraging the strengths of human operators and automation to enhance usability, situational awareness, and operational efficiency in remote collaborative scenarios. This pilot framework aims to demonstrate the feasibility and potential advantages of combining immersive interactions with hybrid teleoperation methods, ultimately contributing to more effective collaboration and control in remote environments.
The Drive Behind Enhancing Robotic Teleoperation
In the rapidly advancing field of robotics, the quest for complete autonomy remains a formidable challenge. Despite remarkable progress, current robotic systems still require enhancements in dependability and the ability to mimic human intelligence, especially in complex real-world scenarios. The challenge is magnified when these robots are tasked with operating in remote locations, often necessitating external human intervention.
Recognizing these challenges, our research focuses on a promising solution: robotic teleoperation. This involves an operator sending supervisory commands over a communication network to a remote robot, while receiving real-time feedback about the robot and its environment. However, the effectiveness of teleoperated systems is influenced by two crucial factors: the operator’s ability to issue effective commands and their accurate interpretation of the remote environment.
Our Proposal: A Distributed Control Method
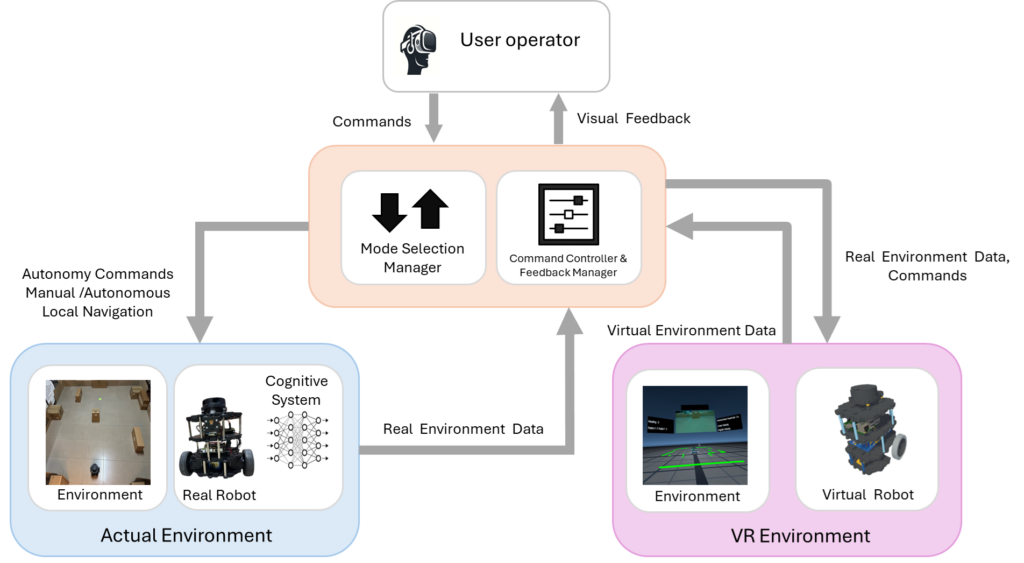
In response to these challenges, our work proposes a distributed control method. This approach allows the operator to maintain high-level control, such as setting destination waypoints, while the robot autonomously manages lower-level controls and trajectory planning. This hierarchy minimizes conflicting decisions, reduces operator discomfort, and decreases computational overhead through parallel decision-making.
Moreover, improving operator perception is equally crucial. Simply increasing sensory data can lead to complexity and computational strain. Therefore, we propose an intuitively designed immersive user interface, offering an efficient presentation method. This ensures operators maintain adequate situational awareness without being overwhelmed by excessive data.
Novel Objectives of Our Approach
Our research addresses critical limitations in current teleoperation methodologies through a novel Distributed Supervised Control (DSC) approach enhanced by reinforcement learning (RL). By integrating these advanced methods, our system achieves a superior balance between human operator involvement and robotic autonomy, optimizing both efficiency and user experience.
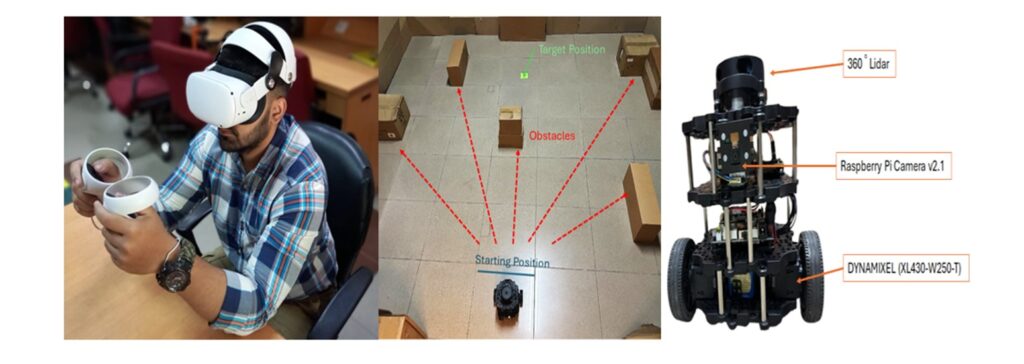
Specifically, the DSC method uniquely separates supervisory control tasks into two tiers. Human operators focus on high-level objectives, such as setting destination waypoints, while robotic systems autonomously handle complex, lower-level operations including obstacle avoidance and precise trajectory planning. To support this interaction, our system utilizes optimized visual feedback within a virtual environment, selectively displaying critical spatial information—such as obstacle depths and key robot states—thus significantly reducing computational demands and processing power compared to full 3D rendering.
A cornerstone of our innovation is the integration of reinforcement learning, particularly employing a goal-driven Twin Delayed Deep Deterministic (TD3) policy. This advanced RL framework empowers robots to autonomously navigate environments with sparse state information, efficiently managing both static and dynamic obstacles, including unforeseen human or object interactions. Consequently, the operator’s cognitive load is substantially diminished, freeing them to engage primarily in strategic decision-making tasks, thus enhancing overall task efficiency.
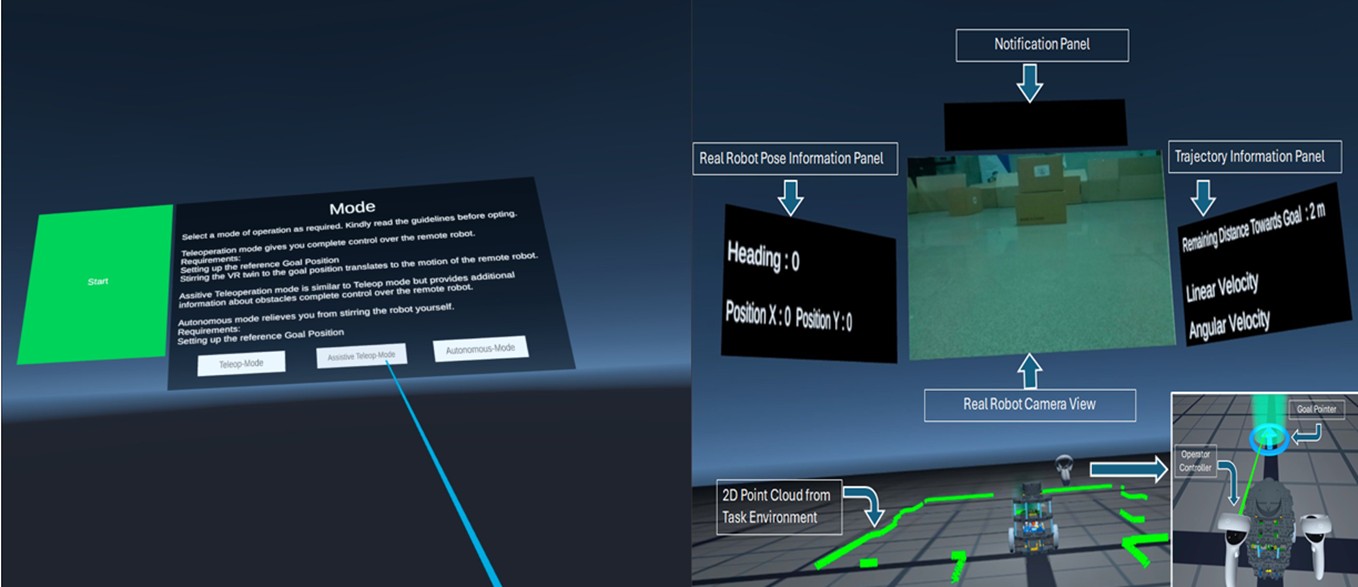
Moreover, our approach streamlines data transmission by implementing onboard compression techniques and efficient messaging protocols. We further introduce a novel method for generating a 2D point cloud overlay using advanced line-rendering techniques to clearly depict spatial boundaries with minimal data. These enhancements collectively reduce latency, computational complexity, and data volume, facilitating rapid and intuitive understanding for operators.
The result? An advanced teleoperation system capable of delivering enhanced navigation accuracy, lower operator workload, and superior responsiveness, significantly outperforming existing methods in dynamic, real-world environments.
System Deployment and Real-Time Testing
Ensuring practical deployment and real-time usability was central to our project. We developed a standalone VR Android application, providing operators with an immersive, ergonomic interaction with robotic environments.
Additionally, we deployed a reinforcement learning (RL) model using advanced Deep Deterministic Policy Gradient (DDPG) algorithms, enabling robots to autonomously navigate complex environments and dynamically manage obstacles.
Our integrated system utilized robust network protocols, connecting mobile robots, local servers, and VR headsets seamlessly. EEG-based cognitive load analysis using Emotiv Insight ensured operator comfort and usability.
We evaluated the system through structured user studies comparing three control modes:
- Direct Control (DC): No robot autonomy; direct imitation.
- Assistive Direct Control (ADC): Direct control with obstacle warnings.
- Proposed Method: Advanced autonomous features optimizing performance and user interaction.
This evaluation confirmed improved performance, effectiveness, and user experience in real-world applications.
Achievements and Future Directions
Through rigorous testing and optimization, our system demonstrated significant improvements in navigation accuracy, operator efficiency, and overall user experience. The use of advanced reinforcement learning algorithms not only enhances robot autonomy but also paves the way for future advancements in teleoperation technologies. Future work will explore further enhancements in model performance, increased adaptability to varied environments, and expanded applications across industries.
Conclusion
The successful development and real-time deployment of our Distributed Supervisory Control (DSC) system represent a substantial advancement in teleoperation technology. By integrating reinforcement learning, VR technology, and cognitive load analysis, we have delivered a practical, user-friendly system that significantly improves the efficiency and effectiveness of remote robotic operations. This innovation lays the groundwork for continued evolution in teleoperation and assistive technologies, promising broader accessibility and greater impact in the future.
The author is an Associate Professor, at School of Mechanical & Manufacturing Engineering (SMME), National University of Sciences and Technology (NUST). She can be reached at [email protected].
Research Profile: https://bit.ly/4c15dkI

![]()